Mobiler Roboter mit zwei angetriebenen Rädern und einem Stützrad
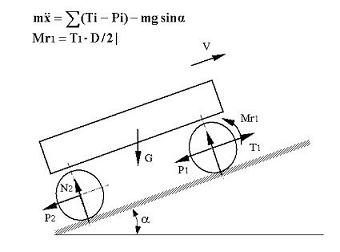
Viele Bastler bauen mobile Roboter, die zwei angetriebenen Räder und ein Stützrad besitzen. Dieser Roboter ist insgemein in einer Wohnung oder anderem Raum unterwegs. Er muss sich im allgemeinen nach ebenen Boden und mancher Steigung (bis 10 Grad) bewegen (Siehe Abbildung unten). Er muss ebenfalls manche Hindernisse in Höhe 25 % von Halbraddurchmesser bewältigen.
Dieses Programm gibt die Möglichkeit die automatische Auswahl des Motors und Getriebes für Ihren Roboter zu treffen. Die Suche führt nach Motorübersicht von www.Roboternetz.de aus. Wenn es mehr als eine Variante gefunden wurde, kann man diese Varianten nach Überdimensionsfaktor vergleichen. Dieser Faktor zeigt das Verhältnis der tatsächlichen Motorleistung zu der notwendigen Leistung. Also je näher der Überdimensionsfaktor zu eins, desto optimaler der Motorleistungsverbrauch.
Für stehende im Programm zur Verfügung Motorendatenbank empfehlt man folgende Angabediapasone:
Robotergewicht, kg: 5 bis 25; Raddurchmesser, cm: 5 bis 25; Geschwindigkeit, cm/sek: 5 bis 30.
Automatische Auswahl des Motors und Getriebes
Angaben für Berechnung
Ergebnisse
Wenn die Suche keines Ergebnis ausgibt, kann man nach diesem Verweis >> die Auswahl des Motors und Getriebes selbst zu erledigen, ausgewählte Motor und Getriebe ausführlich berechnen und überprüfen .
Entwicklung bei V.Volov.
Dazu hat konstruktiv Webmaster von www.roboternetz.de beigetragen