Angaben für Berechnung
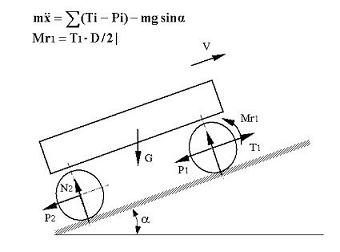
In 3 Schritten folgen Sie zu der Berechnung und Überprüfung der Auswahl des Motors und Getriebes für Ihren Roboter.
Angaben für Berechnung |
|
|
Ergebnis: (Man benutzt für die Motorauswahl)Notwendige Motorleistung: W |
Angabeformular für ausgewählten Motor: | 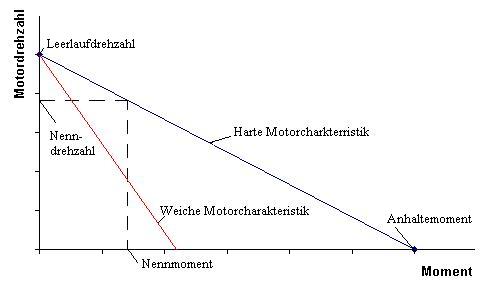
|
Ergebnisse: (Man benutzt für die Getriebeauswahl)Tatsächliche Motorleistung: WNotwendige Getriebeuntersetzung 1: |
Angabeformular für ausgewähltes Getriebe | 
|
Ausgewählte Parametern und Werte (Automatisch wird ausgefüllt)Motortyp:Getriebetyp: Getriebeuntersetzung 1: Raddurchmesser: cm | |
| Ergebnis für das angegebene Robotorgewicht | Ergebnis wird vorgestellt, wo das Robotergewicht optimisiert wurde, damit der Motor im Nennleistungbereich funktionieren würde |
|
Robotergewicht: kg Geschwindigkeit: cm/sek , m/Std Motordrehmoment: Nm; Motordrehzahl: U/min Getriebedrehmoment: Nm; Getriebedrehzahl: U/min |
Max. Robotergewicht: kg Geschwindigkeit: cm/sek , m/Std Motordrehmoment: Nm; Motordrehzahl: U/min Getriebedrehmoment: Nm; Getriebedrehzahl: U/min |